Fundo
Temos vindo a desenvolver a cápsula endoscopia automotores (SPCE) que permite a controlabilidade do lado de fora do corpo e observação em tempo real. Que tipo de endoscópio cápsula (CE) é adequado para uma SPCE controláveis não é clara e um ponto muito crítico para aplicação clínica. Nós comparamos observando a capacidade de três tipos de SPCEs com diferentes ângulos de visão e taxas de quadros.
Onze botões foram costuradas em um estômago porcino excisada. Quatro examinadores controlava o SPCE usando PillCamSB2, -ESO2 e -COLON2 (Given Imaging Ltd., Israel), por 10 minutos cada, com o objectivo de detectar tantos botões e examiná-los, tanto quanto possível. A capacidade para localizar lesões foi avaliada com base no número de botões detectados. A pontuação SPCE-performance (SPS) foi utilizado para avaliar a capacidade de examinar as lesões em detalhe.
O SPCE-ESO2, -COLON2 e -SB2 detectado 11 [intervalo interquartil (IQR): 0], 10,5 (IQR, 0,5) e 8 (IQR, 1,0) botões, respectivamente. O SPCE-ESO2 e -COLON2 tinha uma capacidade significativamente melhor para detectar lesões do que a -SB2 (p < 0,05). O SPCE-ESO2, -COLON2 e -SB2 tinham significativamente diferentes valores SPS de 22 (IQR, 0), 16,5 (IQR, 1,5), e 14 (IQR, 1,0), respectivamente (p < 0,05 para todas as comparações; SPCE -SB2 vs. -ESO2, -SB2 vs. -COLON2 e -ESO2 vs. -COLON2).
Conclusões
PillCamESO2 é mais adequado em diferentes três EC para SPCE pela análise de lesões em detalhe do estômago
Citation:. Ota K, Nouda S, Takeuchi T, Iguchi M, Kojima Y, Kuramoto T, et al. (2015) Que tipo de Capsule endoscópio é adequado para uma controlável automotores Capsule endoscopia? Estudo experimental utilizando um modelo de estômago porcino para aplicação clínica (com vídeos). PLoS ONE 10 (10): e0139878. doi: 10.1371 /journal.pone.0139878
editor: Leôncio Hadjileontiadis, Universidade Aristóteles de Salónica, na Grécia
Recebido: 03 de março de 2015; Aceito: 07 de setembro de 2015; Publicação: 08 de outubro de 2015
Direitos de autor: © 2015 Ota et al. Este é um artigo de acesso aberto distribuído sob os termos da Licença Creative Commons Attribution, que permite uso irrestrito, distribuição e reprodução em qualquer meio, desde que o autor original ea fonte sejam creditados
Disponibilidade de dados: Todos os dados relevantes estão dentro do papel e seus arquivos de suporte de informação
financiamento:. os autores não receberam qualquer financiamento específico para este trabalho. Mu Ltd. forneceu apoio sob a forma de salários para os autores KU, YF, HN e NO, mas não tinha nenhum papel adicional no desenho do estudo, recolha e análise de dados, decisão de publicar ou preparação do manuscrito. Os papéis específicos destes autores são articuladas na seção "autor contribuições"
Conflito de interesses:. Kenshiro Uesugi, Yoshiaki Fujito, Hironori Nishihara e Naotake Ohtsuka são empregados por Mu Ltd. Não há patentes, produtos em desenvolvimento ou produtos para declarar comercializado. Isto não altera a adesão dos autores para todas as políticas de PLoS One sobre os dados e materiais de compartilhamento.
endoscopia Capsule é um procedimento de exame minimamente invasivo que permite a observação do trato intestinal. A cápsula endoscópica (CE) move-se no trato digestivo pelos movimentos peristálticos do intestino, e as imagens que obtém são registrados via comunicação sem fio [1]. Embora cápsula endoscópica foi empregue para a avaliação do intestino delgado, do esófago e do cólon, que são órgãos alongada cilíndrica simples, que não foi utilizado no estômago [1-6]. À medida que o estômago compreende uma grande área com uma forma de bolsa complexa, que não é possível observar o estômago inteiro apenas por peristaltismo intestinal. Além disso, em cápsula endoscópica, a CE não pode ser mantido a uma posição desejada, e ao contrário de convencional do tipo tubo de endoscopia, um examinador não pode observar uma lesão a partir de qualquer direção desejada [7]. Uma solução consiste em acrescentar as funções de controle do lado de fora do corpo e permitir a observação em tempo real para um CE.
Nós desenvolvemos o autopropulsionado Cápsula endoscopia (SPCE), um CE com o acima mencionado funções. Anteriormente, conseguiu o controle do SPCE no estômago de um cão vivo [8] e manobrado com segurança o dispositivo no estômago de um ser humano vivo, intestino delgado e cólon [9].
Para a aplicação prática do SPCE, a sua capacidade de detecção deve ser avaliado de forma objectiva. CE funções para permitir a controlabilidade do lado de fora do corpo e observação em tempo real ter sido desenvolvido em diversas instituições [6, 8, e 9]. No entanto, não existe nenhum relatório objectivo da capacidade de detecção de tais dispositivos. Embora nós produziu com sucesso um SPCE, anexando uma barbatana especial para atualmente disponível EC para o esôfago, intestino delgado e cólon, cada um com diferentes ângulos de visão e taxas de quadros, a CE o mais adequado para SPCE permaneceu incerto.
Para este fim, buscou-se avaliar as diferenças na detecção de capacidade e desempenho entre os três tipos spce, a fin de que foi anexado a um PillCamSB2, PillCamESO2 ou PillCamCOLON2, em um teste de rastreio do estômago. Ao comparar as funções de cada tipo SPCE, buscou-se esclarecer a vantagem de cada função e sua viabilidade na prática clínica, a fim de resolver os problemas de desenvolvimento crítico para qualquer CEs que são controláveis a partir do exterior do corpo em observação em tempo real, incluindo SPCE.
material e Métodos
sistema para SPCE condução através do uso de um campo magnético (Novo sistema MiniMermaid)
Nós relatado anteriormente no sistema de condução para SPCE através do utilização de um campo magnético, isto é, o sistema de Ryukoku-Osaka [8]. No presente estudo, foi utilizado um sistema ainda mais modificado, conhecido como o sistema New MiniMermaid (S1 Video).
O SPCE foi construído ligando um fin dedicada feito de resina de silicone com um micro-ímã para um já existente CE. O comprimento da aleta foi de 19 mm (Figura 1). Quando o micro-ímã é colocado em um campo magnético alternado, vibra. À medida que a vibração transmitida para a aleta, que é convertido a uma força propulsora se em água. Portanto, é necessário fornecer água para dentro do estômago para o controlo do SPCE. Além disso, o controlo tridimensional do SPCE poderia ser conseguido através do ajuste do campo magnético. Em nossos experimentos, um examinador controlava o SPCE com um controlador dedicado, observando através de um sistema de monitoramento em tempo real (RAPID Access; Given Imaging Ltd., Israel). (Fig 2) [8]
SPCE
os três tipos de EC utilizadas no presente estudo estão disponíveis comercialmente em vários países: PillCamSB2, PillCamESO2 e PillCamCOLON2 (Given Imaging Ltd., Israel) [10-12]. As especificações principais de cada EC são mostrados na Tabela 1. A PillCamSB2, que é usado para o intestino delgado, tem uma única cabeça e captura imagens em dois fotogramas por segundo (fps) num ângulo de observação de 156 °. O PillCamESO2, comumente utilizado para o esôfago, tem cabeças de casal, que captura imagens a 18 fps cada um e proporcionar um amplo ângulo de visão extra de 169 °. O PillCamCOLON2 para o cólon também tem cabeças de casal com uma taxa adaptativa quadro (AFR) e um ângulo de visão de 172 ° [10-12]. A AFR permite que o PillCamCOLON2 para capturar imagens em 18 fps no modo de movimento e duas fps no modo praticamente estacionário [13]. O PillCamCOLON2 flutua mais facilmente do que o PillCamSB2 e PillCamESO2 devido à sua gravidade específica menor [14]. Para o CES-i de duas cabeças., O PillCamESO2 e PillCamCOLON2-a câmera de uma cabeça foi utilizada para este experimento, enquanto que a da outra cabeça foi anexado ao fin e não usado para capturar imagens (Fig 1A). Neste estudo, os três SPCEs anexado ao PillCamSB2, PillCamESO2 e PillCamCOLON2 foram nomeados como SPCE-SB2, SPCE-ESO2 e SPCE-COLON2, respectivamente.
O estômago modelo foi criado a partir de um estômago porcino excisada. Onze diferentes teclas coloridas foram cosidos sobre o lado da mucosa do estômago (Figura 3). A cor de cada botão é claramente diferente da cor da mucosa de estômago de porcino sem o fluxo sanguíneo. No estômago humano, avaliação quantitativa é muitas vezes difícil, porque não é possível costurar botões como pontos de referência. O modelo de estômago foi fixado em uma caixa de espuma-estirol para permitir que ele rode manualmente porque um paciente tem permissão para alterar posições posturais na prática clínica. O modelo de estômago foi cheio com 500 ml de água antes da experiência (Fig 4). O estômago de porcino foi excisada obtida a partir da carne de órgãos Osaka Corporation (Osaka, Japão) dois dias antes do procedimento. O estômago foi preparado como descrito acima no dia antes do procedimento.
Quatro examinadores (KO, TK, MI, e KU) participaram do experimento. Os quatro examinadores conhecia as posições dos botões coloridos no modelo estômago de antemão. Cada examinador controlava o SPCE no modelo de estômago por 10 min, na tentativa de detectar e analisar de perto tantos botões quanto possível. O modelo de estômago foi rodado, conforme instruções do examinador. Primeiro, o modelo de estômago foi colocado em decúbito dorsal, em seguida, girado para a posição esquerda decúbito lateral, posição prona, e, finalmente, o decúbito lateral direito. A razão para a mudança de posição foi para minimizar a quantidade de água que flui para fora do estômago para o duodeno. O exame foi realizado dez vezes usando o SPCE-SB2 (KO: 3 vezes, TK: 3 vezes, MI: 2 vezes, KU: 2 vezes) e SPCE-COLON2 (KO: 3 vezes, TK: 3 vezes, MI: 2 vezes, KU: 2 vezes). No entanto, para o SPCE-ESO2, o teste foi realizado apenas nove vezes porque a bateria do PillCamESO2 completamente descarregada durante o exame (KO: 3 vezes, TK: 2 vezes, MI: 2 vezes, KU: 2 vezes).
Eu inventei dois parâmetros para avaliar a capacidade de detecção dos SPCEs. Em primeiro lugar, o número de botões detectado foi usado para avaliar a sua capacidade para localizar lesões. Em segundo lugar, uma pontuação SPCE-desempenho foi calculado para avaliar a capacidade de examinar essas lesões em detalhe. A pontuação foi definido como a soma dos pontos atribuídos a cada botão da seguinte forma: 2 pontos foram dadas se um botão pode ser abordado e observado de perto; 1 ponto foi dado se um botão surgiu à vista, mas não poderia ser abordado em estreita colaboração; e não há pontos foram dadas se um botão não pôde ser detectada (figura 5). O número máximo de botões tinha 11 anos, e que da pontuação SPCE-desempenho foi de 22 pontos.
A experiência de cada SPCE foram espaçadas mais de um mês, eo examinador passou por uma experiência de cada SPCE depois de terem praticado várias vezes com SPCE-SB2 que na experiência anterior. Assim, a melhoria do funcionamento experimentador SPCE através da sobreposição de uma série de experiências, não são considerados.
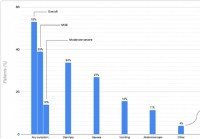
As diferenças significativas entre as médias dos dados para dois grupos de teste diferentes foram avaliadas pelo teste de Mann -Whitney U O número médio de botões detectados em 10 min foi de 11 para o SPCE-ESO2 [intervalo interquartil (IQR): 0], 10,5 (0,5) para o SPCE-COLON2, e 8 (1,0) para o SPCE-SB2. O SPCE-ESO2 e SPCE-COLON2 tinha uma capacidade significativamente melhor para detectar lesões do que a SPCE-SB2 (p < 0,05). Não houve diferença significativa na capacidade de detectar lesões entre a SPCE-COLON2 e SPCE-ESO2. O examinador foi capaz de detectar todos os botões em cada exame utilizando o SPCE-ESO2 (Fig 6). A pontuação média SPCE-desempenho foi de 22 (0) para SPCE-ESO2, 16,5 (1,5) para SPCE -COLON2, e 14 (1,0) para SPCE-SB2. Houve diferenças significativas entre os três tipos spce (p < 0,05 para todas as comparações: SPCE-SB2 contra SPCE-ESO2, SPCE-SB2 contra SPCE-COLON2 e SPCE-ESO2 contra SPCE-COLON2) (Fig 7). nos 10 exames realizados utilizando o SPCE-SB2, detecção dos botões localizados na parte superior do corpo da curvatura maior e fundo de saco era consideravelmente difícil. O SPCE-SB2 poderia detectar o botão no fundo de saco em apenas dois exames ea uma na curvatura maior do corpo superior em três exames. No entanto, a detecção dos botões localizados no antro da parede posterior (10/10 exames), a parte inferior do corpo da curvatura menor (10/09), e a parte superior do corpo da parede posterior (10/09) era quase sempre possível. em oito dos nove exames realizados usando o SPCE-ESO2, todos os botões poderia ser observada em detalhe. O tempo necessário para a SPCE-ESO2 para observar todos os botões em detalhe foi de 468 ± 74 s (7,8 ± 1,2 min). A pontuação do SPCE-SB2 SPCE-desempenho foi baixo em 14 (Tabela 2 ). Dos três tipos spce, o SPCE-ESO2 foi o mais eficaz na detecção de lesões e avaliá-los de perto (S2-S4 vídeos). O presente estudo identificou as especificações CE que afetaram as funções Spce. O SPCE-COLON2 e SPCE-ESO2 tinha um ângulo de visão maior do que o SPCE-SB2, e foram capazes de detectar significativamente mais botões do que o último dentro de 10 minutos, que foi a principal razão para a maior capacidade de encontrar lesões. Além disso, SPCE-COLON2 e SPCE-ESO2, o que poderia levar várias imagens em um segundo, foram capazes de aproximar-se mais perto dos botões do que o SPCE-SB2. Usando um modelo de estômago porcino, demonstramos que CE o mais adequado para o SPCE foi PillCamESO2. Uma vez que o vídeo obtido a partir da SPCE-ESO2 apareceu de forma contínua, o dispositivo de manobra e aproximando-se dos botões no interior do modelo foram fáceis através de controlo sem fios a partir do exterior do modelo estômago. No entanto, nós não esperamos que o SPCE-COLON2 seria inferior ao SPCE-ESO2. Porque o PillCamCOLON2 é concebido para a observação do cólon, a sua gravidade específica é inferior, e o dispositivo é mais aquecido do que a PillCamESO2 [14]. Portanto, o PillCamCOLON2 tende a face para cima, em vez de para baixo na água. Além disso, o SPCE-COLON2 não enviar todas as imagens capturadas para o sistema de monitoramento em tempo real, enquanto que o SPCE-ESO2 poderia enviar todas as imagens capturadas a 18 fps. Além disso, a velocidade de captura do SPCE-COLON2 não é constante devido ao AFR. Esses fatores se refletiram nos diferentes escores SPCE-de desempenho obtidos em nossos experimentos. A velocidade de captura maior habilitado ajustes finos enquanto controla a SPCE. Em outras palavras, o examinador foi capaz de mover o SPCE mais precisamente em direção ao alvo, abordá-lo, e parar a uma distância apropriada. Os nossos resultados sugerem que a SPCE-ESO2 poderia ser utilizado para pesquisar e examinar atentamente o estômago humano em menos de 10 min, o que está dentro da duração usual de um procedimento de endoscopia gástrica e permite o exame suficiente antes da PillCamESO2 corre para fora da bateria. No entanto, o SPCE-SB2, com um desempenho inferior em relação ao SPCE-ESO2, pode perder essas lesões localizadas na parte superior do corpo da curvatura maior e fundo de saco. Além disso, verificou-se que lesões no antro da parede posterior, a parte inferior do corpo da curvatura menor, e a parte superior do corpo da parede posterior eram fáceis de detectar, utilizando o SPCE. O SPCE poderia facilmente se aproximar perto da parede posterior quando o campo magnético foi enfraquecida. Observação do fórnice parecia ser difícil porque o SPCE necessário para ser manobrado em grandes pregas em torno do fundo de saco, em que o ar tende a acumular-se. É importante identificar essas possíveis locais cegos antes da aplicação clínica. No entanto, as lesões de estômago real não pode ser comparado com os botões no estômago modelo utilizado neste estudo. Portanto, precisamos avaliar a seqüência de observação de forma mais eficiente através da realização de novos experimentos usando o modelo de estômago. Rey et al. relatou os resultados de ensaios clínicos utilizando magneticamente guiada cápsula endoscópica (MGCE) que foi uma cápsula endoscópica operatable de fora do corpo desenvolvido por si, mas este não era um exame de comparação da capacidade de MGCE [15, 16]. A partir de nossos resultados, para aplicação clínica, considera-se que a CE controlável com funções como SPCE-ESO2 é adequado. Nosso estudo tem várias limitações. O modelo estômago neste estudo não é o mesmo que um estômago humano vivo com movimento peristáltico e a secreção de muco gástrico. Além disso, o modelo de estômago de porco mucosa falta de fluxo de sangue, e é mais branco do que a mucosa gástrica de um ser humano vivo. Além disso, os quatro examinadores sabia a posição dos botões coloridos no modelo do estômago e isso pode ter feito a detecção dos botões coloridos no modelo de estômago mais fácil. No entanto, nós objectivamente comparou três tipos de SPCE e demonstrado pela primeira vez que SPCE pode observar todas as áreas do estômago. Porque costura botões coloridos para o estômago in vivo não é prático, optamos por utilizar o estômago porcino excisadas. Nós demonstramos que o SPCE-ESO2 poderia ser usado para examinar toda a superfície interna do estômago porcino excisado. Estudos futuros no estômago humano vivo são necessárias. Conclusões No presente estudo, demonstramos que a capacidade de encontrar lesões e examiná-las em detalhe dependia do ângulo de visão do CE e do quadro taxa das imagens, respectivamente. Estes resultados podem permitir-nos para resolver outros problemas da SPCE, tais como controlar a CE a partir do exterior do corpo à vontade, encontrando uma lesão, e examinando-o em detalhe. O SPCE-ESO2 pode ser a mais viável na prática clínica. Futuras experiências utilizando o SPCE-ESO2 num corpo humano são necessários. Além disso, os nossos resultados são considerados como sendo universal para o desenvolvimento de um EC, que é controlável a partir do exterior do corpo e permite a observação em tempo real , incluindo SPCE. Informações de Apoio Reconhecimentos Os membros do "Team Mermaid" são Kazuhiro Ota, Sadaharu Nouda, Toshihisa Takeuchi, Munetaka Iguchi, Yuichi Kojima, Takanori Kuramoto, Takuya Inoue, Yasunori Shindo, Kenshiro Uesugi, Yoshiaki Fujito, Hironori Nishihara, Naotake Ohtsuka e Kazuhide Higuchi.
-teste. Um valor de p < 0,05 foi considerado significativo e todos os testes foram em frente e verso. Os dados são expressos como a média ± desvio padrão. Todas as análises estatísticas foram realizadas utilizando PASW Statistics 18 para Windows (SPSS Japão, Tokyo).
Resultados
Discussão
S1 Vídeo. A cápsula endoscópio auto-propulsão é controlável em direções tridimensionais se em água
doi:. 10.1371 /journal.pone.0139878.s001
(ZIP)
S2 Vídeo. A vista da SPCE-SB2
doi:. 10.1371 /journal.pone.0139878.s002
(ZIP)
de vídeo S3. A vista da SPCE-ESO2
doi:. 10.1371 /journal.pone.0139878.s003
(ZIP)
S4 Vídeo. A vista da SPCE-COLON2
doi:. 10.1371 /journal.pone.0139878.s004
(ZIP)
 A proteína SARS-CoV N induz a produção de IFN-β, provocando a ubiquitinação de RIG-I,
A proteína SARS-CoV N induz a produção de IFN-β, provocando a ubiquitinação de RIG-I,
 A microbiota rural e urbana diferem desde tenra idade,
A microbiota rural e urbana diferem desde tenra idade,
 Rotavírus desempenha um papel no desenvolvimento de diabetes tipo 1
Rotavírus desempenha um papel no desenvolvimento de diabetes tipo 1
 Novo ensaio mostra sobrevida melhorada para pacientes com câncer colorretal avançado mutante BRAF
Novo ensaio mostra sobrevida melhorada para pacientes com câncer colorretal avançado mutante BRAF
 Micróbios intestinais podem estar ligados à depressão
Micróbios intestinais podem estar ligados à depressão
 Manifestações digestivas comuns, mas leves entre pacientes com COVID-19 hospitalizados
Manifestações digestivas comuns, mas leves entre pacientes com COVID-19 hospitalizados
 A hipertensão sempre leva a COVID-19 grave?
Causado pelo agente infeccioso, síndrome respiratória aguda grave coronavírus 2 (SARS-CoV-2), a doença coronavírus 2019 (COVID-19) é frequentemente mais grave em pessoas com condições médicas subjacen
A hipertensão sempre leva a COVID-19 grave?
Causado pelo agente infeccioso, síndrome respiratória aguda grave coronavírus 2 (SARS-CoV-2), a doença coronavírus 2019 (COVID-19) é frequentemente mais grave em pessoas com condições médicas subjacen
 A transmissão da SARS-CoV-2 da mãe para o bebê durante a gravidez é possível, mas rara,
diz estudar A pandemia em curso da doença coronavírus 2019 (COVID-19) causada pela síndrome respiratória aguda grave coronavírus 2 (SARS-CoV-2) não poupa nem homem nem mulher. Vários pesquisadores rel
A transmissão da SARS-CoV-2 da mãe para o bebê durante a gravidez é possível, mas rara,
diz estudar A pandemia em curso da doença coronavírus 2019 (COVID-19) causada pela síndrome respiratória aguda grave coronavírus 2 (SARS-CoV-2) não poupa nem homem nem mulher. Vários pesquisadores rel
 O álcool danifica o microbioma da boca
Um novo estudo mostrou que o álcool altera e danifica o ambiente bacteriano natural na boca. O estudo intitulado, “Beber álcool está associado à variação no microbioma oral humano em um grande estudo
O álcool danifica o microbioma da boca
Um novo estudo mostrou que o álcool altera e danifica o ambiente bacteriano natural na boca. O estudo intitulado, “Beber álcool está associado à variação no microbioma oral humano em um grande estudo