Новый гибкий плагин и играть схему для моделирования, моделирования и прогнозирования опорожнение желудка
Аннотация
модели фона
In-силикомарганца, которые пытаются чтобы захватить и описывают физиологическое поведение биологических организмов, включая человека, являются по своей природе сложный и занимает много времени, чтобы построить и моделировать в вычислительной среде. Уровень детализации описания, включенного в модели зависит от знаний о поведении системы на этом уровне. Это знание собраны из литературы и /или улучшить путем знаний, полученных из новых экспериментов. Таким образом, модель развития является итеративной процедурой развития. Цель данной статьи состоит в том, чтобы описать новый плагин и играть схему, которая обеспечивает повышенную гибкость и простоту в использовании для моделирования и имитации физиологического поведения биологических организмов.
Методы
Эта схема требует Modeler (пользователя) первый поставлять структуру взаимодействующих компонентов и экспериментальных данных в табличном формате. Поведение компонентов, описанных в математической форме, также представленной модельера, внешне связан во время моделирования. Преимущество подключи и играй схемы для моделирования является то, что она требует меньше усилий, программирования и могут быть быстро адаптированы к более новым требованиям моделирования в то же время открывает путь для динамического построения модели.
Результаты
В качестве иллюстрации, модели бумаги динамика желудка поведения опорожнения испытываемые человеком. Гибкость адаптировать модель для прогнозирования поведения желудка опорожнение при различных типов питательных веществ вливанием в кишечнике (подвздошную кишку) демонстрируется. Предсказания были проверены с изучением вмешательства человека. была обнаружена ошибка в предсказании половину времени опорожнение менее чем на 6%.
Выводы
новую схему плагин и играть для моделирования биологических систем была разработана, что позволяет вносить изменения в смоделированной структуры и поведения с пониженным программированием усилия, путем абстрагирования биологической системы в сеть более мелких подсистем с независимым поведением. В новой схеме, моделирование и моделирование становится автоматической машиной для чтения и выполнения задачи.
Ключевые слова
Моделирование опорожнения желудка функциональных модулей контура обратной связи Введение
анализ биологических систем с набором гипотез в руке представляет собой циклический процесс который начинается с экспериментального проектирования, сбора данных, анализа данных, данных или гипотезах моделирования, моделирования и анализа [1, 2]. В каждом цикле, (частично) описание биологической системы перерабатывается либо улучшить или переадресовать гипотезу. Это означает, что в анализе биологических систем, данные /гипотезах модель постоянно претерпевает изменения.
Большинство инструментов системной биологии моделирования требуют, чтобы пользователь вручную инструктировать компьютер с помощью поддерживаемых инструментов программирования для достижения моделирования и моделирования целей [3- 5]. Такая задача включает в себя программно описания биологических компонентов, связанных с ними функций передачи и интерактивное поведение между компонентами. Есть несколько современных инструментов моделирования системной биологии, как Simbiology [6] и PhysioDesigner [7], которые предоставляют пользователю графических дополнений, чтобы выбрать часто используемые биологически активные компоненты и разъемы с поддона инструмента и поместить их в среде построения модели. Тем не менее, функциональные описания всех компонентов и взаимодействий между ними все еще должны быть описаны программно. Таким образом, полный итерационный цикл системной биологии моделирование на практике часто становится чрезвычайно сложной задачей. Крупномасштабный упрощение в моделировании может быть достигнуто, если программирование функционального поведения компонента можно избежать, и задача заменить интегрированием субъединиц предпрограммированного передачи функциональных элементов.
Каждый суб-физиологической сущности, такие как орган, или ткань можно рассматривать как имеющий хорошо указанное функциональное поведение, определенное по отношению к своим входам и выходам. Поведение биологической системы является комплексное поведение этих суб-физиологических структур, работающих в унисон. Таким образом, с физиологической точки зрения, интеграция субъединиц предпрограммированного передачи функциональных элементов, чтобы реализовать функциональные возможности биологического компонента или биологической системы в целом, по-видимому, актуальна.
Эта статья описывает окружающую среду, подходящую для моделирования биологических систем и моделирования, которые снимает усилие повторного программирования обычно ассоциируется с изменениями в опытно-конструкторских и моделирования. Чтобы продемонстрировать работу предлагаемого моделирования и моделирования окружающей среды и ее гибкости для размещения экспериментальных изменений, желудочный поведение опорожнение наблюдается у людей была смоделирована. Регулирование опорожнения желудка образует ключевую роль в сложном процессе еды регулирования впуска, который является активной областью исследований [8-10]. Различные типы клеток, гормоны, рецепторы и нервные сигналы все действуют одновременно в этой системе. В настоящее время в значительной степени неясным, как сигналы, возникающие из различных частей в кишечнике действуют совместно способом обратной связи через центральную нервную систему, чтобы регулировать поведение приема пищи. Предлагаемый подход моделирования может быть полезен для позволяет исследователям быстро и легко построить варианты модели и решить, какой из них предлагает наиболее последовательной интерпретации экспериментальных данных. Таким образом, исследование, направленное на оказание влияния на опорожнение желудка кишечным инфузии питательных веществ была выбрана для примера доказательство правильности концепции. Параметры модели, оцененной на основе экспериментальных данных, полученных от контрольной группы испытуемых были использованы для прогнозирования желудка скорость опорожнения для вмешательства группе, которая получала подвздошной питательный настой.
Дизайн и программная среда
С точки зрения биологической системы Modeler в кто хочет облегчение от перепрограммированию усилий, связанных с экспериментальными и моделирования изменений с течением времени, среда моделирования и моделирования должны позволять пользователю определять суб-физиологические объекты, которые принимают участие в биологической системе смоделированы вместе со своими входными /вне отношений в любой простой и легко изменяемый формат. Кроме того, пользователь должен быть способен обеспечить моделирования и моделирования среды с любыми экспериментальными данными, собранными или поставляемых на системном уровне или суб-физиологическом уровне субъектов. Кроме того, учитывая спецификацию модели и связанные с ними экспериментальные данные, например, в качестве входных данных в текстовом формате, среда моделирования и моделирования должна автоматически построить модель и моделировать смоделированную архитектуру behavior.A программного обеспечения, способного соответствовать требованиям, указанным выше, иллюстрируется на рисунке 1. Центральное место в этой архитектуре является родовым моделирование и моделирование рамки которая включает в себя модель строитель, модель тренажера, а также библиотеку компонентов функции. Модель строитель и имитатор являются скомпилированные исполняемые файлы. Имитатор динамически загружает библиотеку компонентов функции во время выполнения моделирования. Пользователь вводит спецификацию модели и экспериментальные данные для общего моделирования и моделирования структуры с помощью спецификации модели и файла данных в заранее определенном формате. Модель строитель разбирает файл спецификации модели и строит модель, как указано пользователем. Тренажер загружает построенную модель и в сочетании с библиотекой функций компонент имитирует смоделированного поведения с соответствующими данными моделирования. В следующих подразделах будет предоставлять подробные описания модели строитель, модель имитатора, компонент библиотеки функций и спецификации модели и файла данных. Рисунок 1 Generic моделирования и имитации рамки.
Модель строитель
Биологическая система для целей моделирования можно рассматривать как собрание независимых суб-физиологическое лиц, которые работают в унисон для достижения определенных биологических целей. Для моделирования поведения такой биологической системы, удобно выбрать абстракции, который представляет каждый суб-физиологическая сущность как самостоятельный компонент, который вместе с другими компонентами образуют сеть компонентов. Такая сеть, используется для моделирования системы является то модель системы на основе компонентов.
Основная единица модели системы на основе компонентов является компонентом с определенным количеством входов и выходов. Эти входы и выходы связаны с помощью математической функции. Структурная спецификация
компонента, таким образом, определяется как название компонента, вместе с именем его входов и выходов, в то время как функциональная спецификация
компонента определяется как математическое отношение между его входами и выходами. Функция модели строителя построить модель на основе компонентов системы с учетом структурно-функциональные характеристики компонентов, составляющих моделируемого биологическую систему.
Модель тренажера
The имитационную модель имитирует модель системы на основе компонента для заданного количества циклов моделирования. Модель компонент системы с набором входов называется моделироваться в течение заданного числа циклов моделирования, если каждый компонент выходного оценивается при каждом цикле моделирования. Данный цикл моделирования называется завершенной, если каждый компонент выходы были оценены для этого моделирования cycle.The Model Builder строит модель системы на основе компонентов таким образом, что любое добавление или удаление компонентов, в случае необходимости, всегда можно на завершение цикла моделирования. Для иллюстрации этой конструкции гипотетическую модель системы на основе компонентов с 3-х компонентов, а именно: С1, С2 и С3, и соответствующие межсоединений А, В, С и D между компонентами показан на рисунке 2а. Другое визуальное представление той же структурной модели изображена на рисунке 2b. Два визуального представления модели системы не отличаются друг от друга за исключением того, что в последнем случае ребра (межсоединения), связывающими компоненты представлены в виде информационных каналов, и каждый компонент подключен к одному из нескольких информационных каналов. Это представление интуитивно соответствует физиологическое положение органов, связанных кровеносных сосудов и /или нервных каналов. В каждом цикле моделирования данных в настоящее время на информационном канале либо считывается на входы компонентов (подключенных в текущем цикле моделирования) или записываются в информационный канал с выходов компонентов (имеющихся в настоящее время). Эти данные будут считываться или записываться только теми компонентами, подключенными к информационному каналу в текущем цикле моделирования. Это построение модели и моделирование функция позволяет любое количество компонентов модели, которые будут добавлены или удалены из модели системы в процессе моделирования с соответствующими контрольными структурами. Рисунок 2 Пример модели системы. (А) Структурная модель описания модели пример системы. (Б) Аналогичную визуальное представление структурной модели функции.
Библиотека компонентов
The функции компонент библиотеки содержит функциональную спецификацию (т.е. математическое соотношение между входами и выходами) каждого компонента, составляющего модель системы компонент. Поскольку тренажер был запрограммирован для имитации модели во времени, функциональная спецификация компонентов описаны как функции времени, а также. Функциональная спецификация компонентов должны быть определены пользователем и обновляется в библиотеке компонентов функции. Спецификация
модель и экспериментальные данные файла
от модели спецификации и экспериментального файла данных, предоставленного пользователем содержит два набора информации. Первым из них является структурная спецификация компонентов, составляющих модель системы, а второй экспериментальные данные, относящиеся к экспериментов, проведенных в системе. Название компонентов и соответствующих входов и выходов построчно сведены в таблицу. Имя выхода компонента такой же, как на вход другого компонента, если два связаны и различен, если они не подключены. Дополнительный столбец, "Connect", присутствует и имеет значение либо "Да" или "Нет", который соединяет или разъединяет входные /выходные сигналы соответствующих компонентов. Этот столбец добавляется ввести дополнительную гибкость, чтобы связать или отменить ее соответствующее соединение между компонентами.
Для модели гипотетической системы, изображенной ранее на рисунке 2а, компоненты, С1, С2 и С3, являются построчно в табл 1. на вход компонента, C1, т.е. а и D, а на выходе, в, который затем является входным сигналом для компонента, C2. Описания для других компонентов аналогичны. Обратите внимание, что вход C от компонента С3 был отключен путем ввода "Нет" в столбце "Connect". Экспериментальные данные по времени мудрая сведены в таблицу в строке для каждого входа и выхода компонента. Например, на вход А к компоненту C1 в момент времени 0, 20 единиц, и остается равной нулю, для остального времени (5-30). Записи являются пустыми, если экспериментальные данные не available.Table 1 Пример модели спецификации файла для структурного описания модели модели на рисунке 2 а
Результаты
опорожнение желудка, а также перистальтику кишечника, секреции пищеварительных ферментов и пептидные гормоны являются важными физиологические процессы, участвующие в регуляции пищеварения еды процесса [11, 12]. Опорожнение желудка является физиологическим процессом, в котором желудок будет постепенно опорожнить его содержимого в тонкую кишку. Содержание будет стимулировать выделение нескольких гормонов (CCK, PYY, GLP-1 и т.д.) со стороны слизистой оболочки кишечника, которые вызывают сигналы обратной связи через различные нервные пути. Один из этих нервных путей выступает в качестве обратной связи для опорожнения желудка самого процесса. Блуждающего афферентного путь начинается с кишечника и заканчивается на ядре солитарного тракта (NTS) центральной нервной системы [13]. Ответ или отрицательная обратная связь возникает из центральной нервной системы через блуждающего эфферентов и заканчивается в тех местах, в том числе и в желудке, замедляя опорожнение скорость желудка [14].
В нескольких исследованиях было показано, что подвздошной вливанием результаты питательных веществ в задержке опорожнения желудка и малое время транзита кишечника, а также усиления высвобождения гормонов желудочно-кишечного тракта. Исследуя механизм этого так называемого подвздошной активации тормоза представляет потенциальный интерес для разработки функциональных продуктов питания, которые высвобождают питательные вещества, в дистальной части тонкой кишки. Кроме того, Maljaars и др. [12] показали, что подвздошной вливание липидов (сафлоровое масло) привело к более мощным кишечная тормозной эффект по сравнению с duodenual инфузии. Опорожнение желудка был значительно задерживается в подвздошной инфузии по сравнению с дуоденальной инфузии (206 мин против 138 мин) [12]. Многочисленные модели были представлены в литературе, способной моделировать или предсказывать желудка скорость опорожнения у людей [14-16]. Тем не менее, в большинстве из этих моделей только желудок и кишечник были рассмотрены в качестве участвующих компонентов [17]. Полный цикл обратной связи желудочного процесса опорожнения т.е. включая постепенное высвобождение питательных веществ из желудка и последующего высвобождения гормонов, которые вызывают нервные сигналы из желудочно-кишечного тракта, что эффект дальнейшего выброса пищи из желудка (а также потребление новой пищи) в схема обратной связи через центральную нервную систему, не были всесторонне учтены. Помимо этого, схемы моделирования и моделирования, как сообщалось в этих публикациях, включают строгие перепрограммирования шаги в случае должен быть повторно разработан эксперимент.
Чтобы проиллюстрировать процесс моделирования на основе компонентов в рамках предлагаемого моделирования и среда моделирования, следующие разделы будут обсуждать опорожнение желудка и моделирование процесса моделирования с минимальным набором компонентов. Прогностическая способность построенной модели систем затем будет исследована с соответствующими экспериментов, проведенных на добровольцах.
Моделирование опорожнения желудка поведение
Для построения системного уровня опорожнение желудка модель, структурную спецификацию всех компонентов, входящих в состав модели вдоль с экспериментальными данными будут описаны в спецификации модели и данных файла. Функциональная спецификация компонентов затем будет добавлен к библиотеке компонентов функции. Построенная модель желудка опорожнение вместе с библиотекой функций компонента и экспериментальных данных, указанных в описании модели и файла данных будет смоделирован для оценки параметров модели. На практике модель используется для ответа на конкретный вопрос исследования. т.е., "Как питательное вещество X влияет на желудочную скорость опорожнение Y?"
структурной спецификации
Таблица 2 показывает содержание структурной спецификации и файл данных для опустошения модели желудка. Схематическое представление структурной модели показана на рисунке 3. Компоненты, которые составляют структурную модель являются желудка, кишечника (GI) и центральной нервной системы (ЦНС). NUT_INP (Питательный Input), является входным сигналом для компонента желудком. Другой вход, IR_VE (Кишечные Response - Вагусная эфферентах), является обратная связь с центральной нервной системы. Причина, почему выход и вход желудка объединены и обычно называют NUT_INP станет ясно, когда функциональная модель Желудок описана. Другой выход Желудок, NUT (Питательный) является входным сигналом для следующего компонента кишка. Внешний вход ГАЙКА привязан к входу Кишечник вливание вход, который может модулировать желудочные явления опорожнении. В экспериментальной установке, этот настой вводят через катетер, введенный в желудочно-кишечном (GI) тракта, с наконечником катетера, расположенного в дистальном отделе тонкой кишки (подвздошной кишки). Выход кишка, IR_VA (кишечная Response - вагусными афферентов) является входным сигналом для следующего компонента ЦНС. Выход ЦНС, IR_VE, как объяснено ранее, является обратной к компоненту Stomach.Table 2 Рисунок 3 Схематическое изображение структурной модели для опорожнения желудка, например.
Экспериментальный сегмент данных структурной модели файла содержит данные для каждой временной точки, которые либо внешние входные значения в модели системы или экспериментально измеренные значения на выходах компонентов, входящих в состав системы. В желудочном примере модели внешний вход подается в NUT_INP в виде стандартного завтрака еды [18] во время '0' мин (выраженная в виде калорийности стандартного завтрака), а настой внешний вход NUT одновременно '30 'минут до' 120 'минут с шагом 5 минут (выраженное в виде теплотворной подаваемого в 5 мин). Остальные значения ввода /вывода для всех компонентов между временем '0' и '240' с временным шагом минут '5' или не были измерены или нет и, следовательно, остается пустым.
Функциональная спецификация
Динамика опорожнения желудка функционально описаны в компоненте желудка. Кишечный обратной связи регуляции опорожнение желудка функционально реализован в виде тормозного механизма, который замедляет желудочный константу скорости опорожнение. Для кишечника компоненты и центральной нервной системы, а не более детальной физиологической модели, были выбраны серо-коробка модель с минимальными функциональными элементами и связанных с ними параметров. Функциональное описание модели для каждого компонента, составляющие желудочный модели опорожнение описаны в следующих подразделах и связанных с ними параметров, которые будут оценены во время калибровки модели приведены в таблице 3.Table определений 3 Параметр
Имя параметра
Параметр
Единица
Значение
опорожнения желудка константа скорости
к
м
я
п
-1
Для оценить
порог сигнала эфферентной
THD
безразмерная
Чтобы оценить скорость передачи данных
ИК постоянная
IR_TR
E
-1
Чтобы оценить <бр> В естественных условиях скорость распада константа
INV_DR
м
я
п
-1
Чтобы оценить
Калорийность класса
CAL_GRD
безразмерная
0,6
Время на максимальной амплитуде
T_MAX
мин
10
коэффициент передачи
TRF_K
безразмерную
1 Разбейте постоянный процент
BRK
безразмерная страница 3 желудок
Компонент желудка имеет два входа: N
U
T
_I
N
P
и I
R
_V
E
, два выхода: NUT
и N
U
T
_I
N
P
. Для начального калорийности ввода, N
U
T
_I
N
P
(0), калорийность вход N
U
T
_I
N
P
(т
) сохраняется в желудке в то время т
описывается уравнением 1, где Т время в минутах, к является опорожнение желудка константа скорости в минут и б является экстраполированы у отсекаемый от концевой части опорожнением кривой [15]. NUT_INP <мо> (
<ми> т
<мо>)
<мо> =
NUT_INP <мо> (
<тп> 0
<мо>) <бр> <МО> *
<тп> 1
<мо> -
<тп> 1
<мо> -
<ми> е
<мо> -
<ми> к
<Мо> *
<ми> т
<ми> б
(1) Переписав уравнение 1 в форме приводит разностное уравнение в уравнении 2, где N
U
T
(т
+ Δ
т
) является калории, отчисленные из желудка в кишечник при Т
+ Δ
т
и Δ <бр> т
интервал моделирования. NUT <мо> (
<ми> т
<Мо> +
<мили> &Dgr; t
<мо>)
<мо> =
NUT_INP <мо> (<бр> <ми> т
<Мо> +
<мили> &Dgr; t
<мо>)
<мо> -
NUT_INP <Мо> (
<мили> т <бр> <мо>)
<мо> =
<ми> е
<Мо> (
<ми> т
<мо>)
<Мо> *
<ми> &Dgr; t
<Мо> *
CAL_GRD <Мо>,
(2) где <ми> е
<Мо> (
<мили> т
<Мо> )
<мо> =
NUT_INP <мо> (
<тп> 0
<мо>)
<Мо> *
<мили> б
<мо> *
<мили> к
<Мо> *
<тп> 1
<мо> -
<ми> е
<мо> -
<ми> к
<Мо> *
<ми> т
<ми> б
<мо> -
<тп> 1
<мо> *
<ми> е
<мили> к
<Мо> *
<ми> т
и CAL_GRD является калорийность сорта определяется как процент калорийности вход, поглощаемого кишечником. Предполагая равномерное распределение и поглощение калорий вдоль кишечника, доля калорий поглощается подвздошную может быть аппроксимирована процент площади поверхности подвздошной кишки. Общая длина двенадцатиперстной кишки, тощей и подвздошной кишки составляет 25, 260, 395 см [19]. Предполагая постоянным радиусом кишечника, площадь поверхности процент подвздошной кишки составляет 60%, и, таким образом, значение 0,6 было выбрано для CAL_GRD [20].
В модели, опорожнение желудка константы скорости К уменьшается на процент BRK , при каждом случае, что передаточная функция ответа эфферентной кишечная sgmd
превышает фиксированный порог постоянной THD (Эфферентная пороговый сигнал постоянным). Кишечный передаточная функция ответа эфферентной sgmd
определяется уравнением 3. Величина Ь в уравнении 1 затем вычисляется как B
= е
к
* T
_L
а
G
от к данному значение T
_L
управлением
G
, начальная задержка опорожнения желудка [15]. sgmd <мо> (
<ми> т
<мо>)
<мо> =
<тп> 2
<мо> /
<мо> (
<тп> 1
<Мо> +
<ми> е
<мо> -
IR_TR <Мо> *
IR_VE <Мо> (
<мили> т <бр> <мо>)
<мо>)
<мо> -
<тп> 1
<Мо>,
(3) где I
R
_T
R
является кишечная скорость передачи постоянной, и я
R
_V
E
является кишечная блуждающего эфферентной ответ от центральной нервной системы.
Чтобы найти подходящее значение для БРК, мы считали, что модель оценивается с временным разрешением в 1 минуту, что позволяет системе выполнять при максимальном случае 1 перерыв в минуту. Кроме того, для диапазона изменения питательных веществ индуцированных опорожнения желудка половину времени мы взяли в качестве справочных данных из Robertson и соавт. [21], показывая, что добавление п-6 полиненасыщенных жирных кислот (ПНЖК), по сравнению с п-3 ПНЖК к еде может привести к увеличению времени желудка наполовину опорожнение от 155 до 237 минут. Затем мы требовали, что 15 последовательных событий перерыв быть достаточным, чтобы увеличить Thalf от 155 до 237 минут, с тем чтобы обеспечить значительное снижение скорости опорожнения желудка в пределах длины инфузионной течение 90 мин, используемых в эксперименте. Это привело к значению 0,03 или 3% для БРК (т.е. 155 * 1,03 15≈237)
Кишечник
Компонент кишечника имеет вход:. NUT
и выход I
R
_V
управлением
. Кишечного блуждающего афферентного ответ я:
(
+ Δ
т
т) в момент времени Т запутанным блуждающего афферентного ответ в Е (произвольно выбранный R _V ) единиц кишечной калорийности ввода от 0 до т, как показано в уравнении 4. IR_VA <мо> (
<ми> т
<Мо> +
<мили> &Dgr; t
<мо>)
<мо> = Σ
<ми> я
<Мо> =
<тп> 0
<ми> т
<Мо> /
<мили> &Dgr; t
<ми> а
<Мо> *
<мо> (
<ми> т
<мо> -
<Мо> (
<мили> &Dgr; t
<Мо> *
<ми> я
<мо>)
<мо>)
<ми> б
<Мо> *
<ми> е
<мо> -
<ми> с
<Мо> *
<мо> (
<ми> т
<мо> -
<мо> (
<мили> &Dgr; t
<Мо> *
<ми> я
<мо>)
<мо>)
(4), где
= N <бр> U
T
(Δ
т
* я
) * (с
* е
/б
) B
, то в естественных условиях (кишечного блуждающего афферентного ответа) константы скорости распада, с
= I
N
V
_d
R
, и б
= T
_M
X
* C
, где T_MAX время, при котором кишечная блуждающего афферентного ответ на кишечную вход максимально. Чтобы выбрать значение для T_MAX мы взяли время максимальной реакции гормона наиболее тесно связанного с регулированием скорости опорожнения желудка, т.е. ССК, в качестве эталона. На этот раз была прочитана из рисунка одного А в [22], как 10 минут
CNS
Компонент CNS имеет вход:. Я
R
_V
и выход I
R
_V
E
. Эфферентная реакция ЦНС, я
R
_V
E
к афферентные ввода I
R
_V
управлением
определяется в уравнении 5. IR_VE <мо> (
<ми> т
<Мо> +
<мили> &Dgr; t
<мо>)
<мо> =
TRF_K <Мо> *
IR_VA <мо> (
<ми> т
<мо>)
(5) Так как нам не удалось найти количественные данные по кишечником мозга афферентные-к-эфферентной нервной сигнальной трансдукции, мы предположили, прямой пропорциональный блок переноса (TRF_K = 1) по причинам простоты.
опорожнения желудка и протокол калибровки модели
экспериментальный протокол для калибровки и прогнозирования опорожнения желудка с последующим модель основные принципы, описанные в [23] с незначительными изменениями. В момент времени Т = 0 мин, стандартный твердый прием пищи был поглощен добровольца а. 13C каприловой кислоты добавляли к стандартному питание завтрак для измерения желудка скорость опорожнения. Несмотря на то, <тп> 13
CO <тп> 2
испытание дыхания не непосредственно измерить опорожнение желудка, было показано, что хорошо коррелирует с золотым стандартом сцинтиграфии в нескольких исследованиях. Тем не менее, ни один из различных математических моделей, используемых для извлечения Thalf значений из измеренных данных обогащения 13С не было показано, что универсально подходит для всех различных применений теста. Для углубленного обсуждения, мы отсылаем читателя к [24]. Методика основана на твердом сохранении 13C-октановой кислоты в твердой фазе стандартного пробного приема пищи во время его прохождения через желудочной среде, с последующим быстрым распадом твердой фазы в двенадцатиперстную кишку с последующим поглощением 13C октановой кислоты и окисление в печени до <тп> 13
CO <тп> 2
, который выдыхается в дыхании. Было показано, что пост-желудочного метаболизма (поглощение 13С октановой кислоты, метаболизм печени к <тп> 13
CO <тп> 2
и экскреции с помощью дыхания) подобны, таким образом, менее влиятельные, между отдельными лицами [16]
при Т = 30 мин, раствор, содержащий либо соль (плацебо) или сафлоровое масло (SO) вливают в подвздошной кишке. Перфузия осуществлялась с насосом, подключенного к nasoileal трубки. Вливание продолжалось в течение 90 минут (т.е. до тех пор, пока T = 120 минут) со скоростью 1 мл /мин. Образцы дыхания были взяты в следующих точках времени; За 15 минут до еды и на 15, 30, 45, 60, 75, 90, 105, 120, 180, 210 и 240 минут после стандартного завтрака еды. Из каждого из образцов дыхания измеряли процент доза /ч 13C выдыхаемого. Thalf и TLag были вычислены из процентной дозы /ч измерений 13С [25, 26].
При осмотре 13С дыхательный тест данных мы столкнулись с большими взаимосвязанном и внутри- индивидуальной изменчивости значения Thalf оценкам, от значений обогащения 13С . По этой причине мы воздержались от парного анализа тест-а принял подход на основе населения. Мы провели прогностическую тест функциональных возможностей модели с помощью 3-х различных подборки данных 13С, следующим образом, S1: полный набор данных; S2: набор данных, из которых были отброшены все кривые, которые показали один или несколько экземпляров возникновения отрицательного значение обогащения 13С; S3: набор данных, из которого все кривые классифицируются как останец основанные на хи-квадрат критерия были отброшены. Измеренное значение было классифицировано как выброс, если Хи-квадрат оценка (<мили> χ
<ми> я
<тп> 2
<мо> =
<мо> (
<ми> х
<ми> я
<мо> -
<мили> х
<мо> ̄
<мо>)
<тп> 2
<мо> /
<мили> s
<тп> 2
), где х
я
это среднее значение тестовых измерений 13C дыхания для I
т
ч
при условии, <ми> х
<мо> ̄
является общее среднее тестовых измерений 13C дыхание, а s представляет собой стандартное отклонение, была больше 1. Выбор S1 является наиболее полным, но имеет недостаток, заключающийся в том, что большая между индивидуальные различия могут затенить эффект лечения, таким образом, уменьшая значение, которое может быть связано с моделью интеллектуального тестирования функциональных возможностей. Выбор S2 должен меньше страдают от этой проблемы, сохраняя при этом больше данных. S3 Выбор можно считать самым строгим для нашей модели целей тестирования. Таким образом, мы сосредоточимся на результатах, полученных с помощью выбора данных S3 и привести результаты с выделенными данных S1 и S2 только для сравнения.
На стадии калибровки, желудочные параметры опорожнение модели, показанные в таблице 3, были оценены. Для выбора данных плацебо S3, функция измерения 13С (доза /ч [% 13C]) из добровольцев 1, 6, 13, 14, 15, 16, 17 и 18 (данные, имеющиеся в качестве дополнения к рукопись Дополнительный файл 1), соответствующий вливанием плацебо были выбраны для оценки% кривой 13C константы (а, Ь, с; у = а
т
B
е
-с
т
[25]), из которых половина опорожнение времени (T
H
управлением
л
е
P
B
) и выдержки времени (T
L
управлением
г
P
B
) для плацебо вливания были рассчитаны путем установки одной кривой ко всем данным (модель населения). Желудочные параметры empyting модели затем были оценены путем моделирования модели с экспериментальными входных условий, соответствующих инфузии плацебо и оптимизированы с использованием процедуру подгонки нелинейных наименьших квадратов, для параметров, которые приводят к опорожнение желудка кривой с половиной опорожнение времени, и время запаздывания, равное T
H
управлением
л
е
P
B
и T
L
управлением
г
P
B
соответственно.
 Коронавирусам человека необходимы органические материалы для эффективного переноса между поверхностями
Коронавирусам человека необходимы органические материалы для эффективного переноса между поверхностями
 Открытие 100 новых генов может помочь в исследованиях болезней пигментации
Открытие 100 новых генов может помочь в исследованиях болезней пигментации
 Органические яблоки обладают пробиотическими свойствами
Органические яблоки обладают пробиотическими свойствами
 Почему у пациентов с COVID-19 больше патогенных бактерий в носу
Почему у пациентов с COVID-19 больше патогенных бактерий в носу
 Хорошие новости для людей, страдающих СРК, поскольку исследователи определяют «кишечный зуд».
Хорошие новости для людей, страдающих СРК, поскольку исследователи определяют «кишечный зуд».
 Дырявый кишечник и космический полет - раскрыт механизм
Дырявый кишечник и космический полет - раскрыт механизм
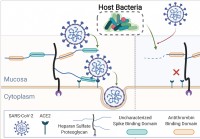 Микробиом человека сокращает гликаны слизистых оболочек,
влияние на инфекцию SARS-CoV-2 Международная группа исследователей провела исследование, показывающее, что различия в микробиоме человека могут влиять на способность коронавируса 2 (SARS-CoV-2) инфици
Микробиом человека сокращает гликаны слизистых оболочек,
влияние на инфекцию SARS-CoV-2 Международная группа исследователей провела исследование, показывающее, что различия в микробиоме человека могут влиять на способность коронавируса 2 (SARS-CoV-2) инфици
 Новый метод компьютерного моделирования предсказывает, как микробы кишечника меняются с течением времени
Новый метод компьютерного моделирования использует снимки типов микробов, обнаруженных в кишечнике человека, чтобы предсказать, как сообщество микробов изменится с течением времени. Инструмент, разраб
Новый метод компьютерного моделирования предсказывает, как микробы кишечника меняются с течением времени
Новый метод компьютерного моделирования использует снимки типов микробов, обнаруженных в кишечнике человека, чтобы предсказать, как сообщество микробов изменится с течением времени. Инструмент, разраб
 Если вам больше 50,
Пришло время для колоноскопии Люди откладывают определенные дела - уборку гаража, перекраска гостиной, мыть окна… и делать колоноскопию. Но колоноскопия, вероятно, является лучшим вариантом для выявл
Если вам больше 50,
Пришло время для колоноскопии Люди откладывают определенные дела - уборку гаража, перекраска гостиной, мыть окна… и делать колоноскопию. Но колоноскопия, вероятно, является лучшим вариантом для выявл