Ultrasonic sakse assistance kan forkorte konsollen tid i robot gastrektomi for tidlig mavekræft
Abstract
Baggrund
Robotic gastrisk kirurgi er blevet indført, og er ved at blive udføres på mange japanske faciliteter. Der er nogle begrænsninger af anordninger, der kan, der skal anvendes i de robotarme i da Vinci kirurgiske system. Vi har revideret vores første ti sager med tidlig mavekræft, der undergik robot-assisteret gastrektomi og har sammenlignet den operative tid mellem tilfælde, som gennemgik operationen kun med en elektrisk kautering enhed og dem i hvem laparoskopisk koagulerende saks (LCS) gennem en assistent port var brugte.
Fund
Vi brugte en elektrisk kautering enhed kun i tilfælde 1-3, og LCS i sager 4-10 undtagen tilfælde 9. Den gennemsnitlige operative tid blev 454 min i tilfælde, hvor der kun robotter enheder blev brugt og 414 min i dem med LCS hjælpe. Den gennemsnitlige konsol på cirka 251 minutter i dem med LCS bistå var signifikant kortere end for 306 min i tilfælde, hvor kun robotindretninger blev anvendt. Antallet af dissekerede lymfeknuder var tilfredsstillende, og den anslåede blodtab var lille. Postoperative komplikationer i to tilfælde var svag og forbigående med korte hospitalsophold.
Konklusion
Assistant brug af ultralyds saks er nyttigt at forkorte konsollen tid i robot gastrektomi.
Nøgleord
Robotic kirurgi mavekræft Ultrasonic saks fund Salg mavekræft er den femte mest udbredte neoplasme verdensplan [1], og kirurgi er den vigtigste helbredende behandling for denne malignitet. Forskellige tekniske særlige procedurer har været forsøgt, og laparoskopisk gastrektomi med lymfeknudedissektion har vist sig at være ikke blot muligt, men også sikkert, at opnå bedre tidlige postoperative resultater sammenlignet med konventionelle åbne gastrektomi [2-4]. Et minimalt invasiv tilgang har vundet stigende accept på grund af forbedrede postoperative resultater. Robotic kirurgi er en ny teknologi, der tillader laparoskopisk procedurer, der skal udføres på mange kirurgiske situationer, og da Vinci Kirurgisk System er blevet indført med opmuntrende resultater [5, 6]. Robotic gastrektomi er en gennemførlig og sikker procedure i hænderne på erfarne laparoskopiske kirurger [7, 8]. I Japan har der været en vis begrænsning i tilgængeligheden af enheder i da Vinci Kirurgisk System. For eksempel kan vi ikke bruge ultralyd saks, som er nyttige for lymfeknude dissektion i da Vinci Kirurgisk System. I denne artikel, vi analyserede vores første erfaringer med robot gastrektomi med da Vinci S Kirurgisk System.
Metoder
Anvendelse af da Vinci S Kirurgisk System på Kobe University, Kobe, Japan begyndte i februar 2011. Den oprindelige ti konsekutive patienter med tidlig mavekræft, der var præoperativt diagnosticeret som cT1N0M0 mellem februar 2011 og april 2012 og efterfølgende gennemgik robot-assisteret gastrektomi (RAG) blev anvendt i analyserne. Beslutningen om at anvende RAG kun hos patienter med tidlig mavekræft er baseret på anbefalinger fra den japanske behandling retningslinje for mavekræft [9] samt det faktum, at onkologisk sikkerhed minimalt invasiv kirurgi til avanceret mavekræft stadig kontroversielt [3] . De clinicopathologic egenskaber, postoperative resultater og postoperative morbiditet i hvert enkelt tilfælde er vist i tabel 1. Før operationen, blev detaljerne i proceduren forklaret til alle patienter, og passende blev opnået skriftligt informeret samtykke. Denne kliniske undersøgelse blev godkendt af Institutional Review Board of Kobe Universitetshospital (nr 1110) og registreret i kliniske forsøg Registry (Umin-CTR) University Hospital Medical Information Network (Umin) (UMIN000004181, registreret 10 September 2010) .table 1 patienternes clinicopathologic karakteristika
Case #
Alder
Sex
BMI
pT
pN
blodtab (g)
operative tid (min)
Console (min)
Postop. Hosp. ophold
Robotic kun eller LCS hjælpe
1
61
M
23,5
pT1a
PN0
60
426
275
11
Robotic kun
2
71
M
21,3
pT1b
PN0
30
408
304
11
Robotic kun
3
57
F
26,0
pT2
PN0
60
462
290
10
Robotic kun
4
70
M
23,5
pT1a
PN0
94
386
225
12
LCS hjælpe
5
44
F
18,0
pT1b
PN0
0
347
204
16
LCS hjælpe
6
59
F
21,9
pT1b
PN0
65
404
250
11
LCS hjælpe
7
50
F
21.3
pT1a
PN0
90
441
243
12
LCS hjælpe
8
68
M
26,8
pT1b
PN0
155
461
273
11
LCS hjælpe
9
74
M
21,4
pT1b
PN0
90
518
355
10
Robotic kun
10
64
M
24,6
pT1a
PN0
45
444
308
12
LCS hjælpe
Alle operationer i den aktuelle undersøgelse blev udført af en kirurg (DK) og de samme assistenter (TN og SS). Den da Vinci S Kirurgisk System blev anvendt i alle procedurer undtagen mave-duodenale eller mave-jejunal anastomoser. Alle patienter gennemgik distal gasrectomy med D1 + eller D2 lymphadenectomy. Figur 1 viser placeringen af trokarer. Vi brugte en 12-mm trokar til kameraet, tre trokarer 8 mm for robotarme, og en 12-mm trokar for den kirurgiske assistent. Næsten alle de kirurgiske procedurer i bughulen er identiske med dem af laparoskopisk gastrektomi. Da ultralyds sakse ikke kan anvendes i Japan, anvendte vi monopolære krum saks i 1. arm, Maryland bipolære pincet i 2. arm og Cadiere pincet i 3. arm af robotten. Assistenten trækker maven eller bugspytkirtel, opererer hæfteenheden, og anvender klip. For at afkorte konsollen tid, assistenten brugte ultralyd sakse (laparoskopisk koagulerende saks, LCS) at dissekere de omentum og perigastric lymfeknuder langs mindre krumning i tilfælde 4-10 undtagen tilfælde 9. Maven blev ekstraheret gennem en 4 cm snit på øvre abdomen, og den distale gastrektomi blev gjort. Rekonstruktion af Billroth-I-metoden blev udført gennem denne incision under anvendelse af en 29 mm cirkulær hæftemaskine. Fig. 1 Placering af havnene i robot gastrektomi. C
kamera port. En
hjælpe port. ①: 1. robotarm port. ②: 2nd robotarm port. ③: 3. robotarm port
Statistisk analyse blev udført under anvendelse af uparret Students t-test. P-værdier < 0,05 blev betragtet som statistisk signifikant
Resultater
Tabel 1 viser clinicopathologic karakteristika og operative resultater af patienterne.. Selvom den præoperative kliniske iscenesættelse af alle patienterne var lavere end cT1N0M0, én patient (tilfælde 3) havde en pT2 læsion. Antallet af dissekerede lymfeknuder var tilfredsstillende at evaluere patologisk metastase patologisk. Den gennemsnitlige operative tid var 454 minutter i tilfælde, hvor der kun robotter enheder blev brugt, og 414 min i dem med LCS hjælpe. Selvom den udløsende tid var kortere med LCS bistå, var der ingen statistisk signifikant forskel. Imidlertid var den gennemsnitlige konsol på cirka 251 minutter i dem med LCS bistå var signifikant kortere end for 306 min i tilfælde, hvor kun robotindretninger blev anvendt (fig. 2). Forskellen mellem disse midler konsol tid var -55,5 min, 95% konfidensinterval -108,9 til -2,1 min; p = 0,0435. Den anslåede blodtab var lille. Postoperative komplikationer inkluderet forsinket gastrisk tømning i tilfælde 5 og lever dysfunktion i tilfælde 6, begge var svag og forbigående med korte hospitalsophold. Fig. 2 Drift tid af hver enkelt sag. Den gennemsnitlige konsol på cirka 251 minutter i dem med LCS bistå var signifikant kortere end for 306 min i tilfælde, hvor kun robotindretninger blev anvendt
Diskussion
Robot-assisteret laparoskopisk kirurgi tilvejebringer en 3-dimensionel visning og leddelt bevægelse uden fysiologisk tremor. Generelt er robot kirurgi rapporteret at kræve en længere driftstid end laparoskopisk eller åben konventionel kirurgi. Den langvarige driftstid er forårsaget af ekstra set-up tid for robotarme, men denne forberedende periode kunne forkortes [7]. En anden grund til forsinkelsestid kan være begrænsningen af enheder, der kan anvendes i Japan. Ultralyds saks er en nyttig enhed til at dissekere det væv, herunder fartøjer. Det kan sikkert okkludere ikke kun arterier men også vener og lymfekar. Vi brugte ultralyd saks hovedsageligt i to operative procedurer udført af assistent gennem hjælpe porten. Jo større omentum blev delt, og dissekeret ved anvendelse af de ultrasoniske saks mod den nedre pol af milten. Efter klipning af rødderne af venstre gastroepiploic fartøjer blev opdelingen af omentum fortsatte nedad til pylorus. Denne opdeling af omentum behov mindre sofistikeret manipulation og er hurtigere. En anden procedure er dissektion af perigastric lymfeknuder omkring mindre krumning op til esophagogastric junction. Det er undertiden vanskeligt at opnå hæmostase ved monopolare eller bipolære enheder. Anvendelse af clips tager tid, fordi clipsene skal indlæses én efter én. De ultrasoniske saks er effektive til at forsegle fartøjer på dette område. Således assistent støtte ved hjælp af ultralyd saks var signifikant effektiv til at forkorte konsollen tid (fig. 2). I tilfælde 9 blev alle dissektion procedurer udføres af robotter blot uden ultralyd shears assistance imidlertid konsollen tid i dette tilfælde var 355 min. Selvom vi forventer, at lære effekt at forkorte konsol tid, dette forsøg lykkedes ikke. Selvfølgelig er der stadig en begrænsning af statistisk analyse på grund af det lille antal tilfælde, vil en yderligere analyse med flere sager anbefales.
Noshiro et al. [10] rapporterede, at robot-assisteret distal gastrektomi hjælp elektriske kautering instrumenter uden ultralyd-aktiverede enheder var muligt og sikkert med hensyn til blodtab, lymfeknude dissektion, og komplikationer. Hvis en række forskellige enheder var til rådighed for udvælgelse, vil det øge mulighederne for at udføre en sofistikeret operation.
Ultrasonic energi instrumenter eller et fartøj sealer vil være nyttigt for at udføre effektive operative procedurer på kortere tid. På nuværende tidspunkt, assisterende brug af ultralyds saks er nyttig i robot gastrektomi
Notes
Yoshihiro Kakeji og Daisuke Kuroda bidrog ligeledes til dette arbejde
Forkortelser
RAG:.
Robot- bistået gastrektomi (RAG)
LCS:
laparoskopisk koagulerende saks
erklæringer
Forfattere bidrag
YK og DK bidraget ligeligt til dette arbejde. DK, TN, og SS udførte kirurgi. TN og SS analyserede data. MY, SK, TI, og KT drøftede analysen. YK og DK designet undersøgelsen og skrev manuskriptet. Alle forfattere læst og godkendt den endelige manuskript.
Taksigelser
vi takker Takashi Omori fra Center for Klinisk Forskning Promotion, Kobe Universitetshospital, Kobe, Japan, som revideret statistiske metoder. Denne undersøgelse blev foretaget uden finansieringskilder.
Overholdelse etiske retningslinjer
konkurrerende interesser Forfatterne erklærer, at de ikke har nogen konkurrerende interesser.
Finansielle oplysninger Alle forfattere har indikeret at de ikke har økonomiske relationer er relevante for denne artikel til . offentliggørelse
Open AccessThis artiklen distribueres under betingelserne i Creative Commons Attribution 4.0 International License (http:. //creativecommons org /licenser /ved /4. 0 /), som tillader ubegrænset brug, distribution og reproduktion i ethvert medie, forudsat du give passende kredit til den oprindelige forfatter (e) og kilden, give et link til Creative Commons-licensen, og angive, om der er sket ændringer. Creative Commons Public Domain Dedication frafald (http:. //Creativecommons org /public domain /nul /1. 0 /) gælder for de data, der stilles til rådighed i denne artikel, medmindre andet er angivet
.
 Forskere udvikler en tilgang til at vaccinere mod tarmbetændelse
Forskere udvikler en tilgang til at vaccinere mod tarmbetændelse
 RNA -sekventering giver ny indsigt i mikrobiomet
RNA -sekventering giver ny indsigt i mikrobiomet
 Patienter med IBS kunne drage fordel af D -vitamin kosttilskud,
Patienter med IBS kunne drage fordel af D -vitamin kosttilskud,
 Thiopuriner kan hjælpe med at stoppe viral replikation i menneskelige coronavirus
Thiopuriner kan hjælpe med at stoppe viral replikation i menneskelige coronavirus
 Fiskeslim kan være en potentiel kilde til antibiotika, finder undersøgelse
Fiskeslim kan være en potentiel kilde til antibiotika, finder undersøgelse
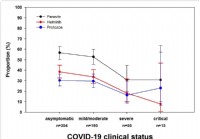 Forskning viser, at tarmparasitangreb reducerer sværhedsgraden af COVID-19
Forskning viser, at tarmparasitangreb reducerer sværhedsgraden af COVID-19
 Forskere udvikler 3D -trykt pille, der prøver bakterier, der findes i tarmen
Tarmmikrobiomet består af billioner af levende mikrober, og mere end tusind bakteriearter. Det har været kendt, at tarmen spiller en vigtig rolle i kroppens sundhed. Et team af universitetsingeniører
Forskere udvikler 3D -trykt pille, der prøver bakterier, der findes i tarmen
Tarmmikrobiomet består af billioner af levende mikrober, og mere end tusind bakteriearter. Det har været kendt, at tarmen spiller en vigtig rolle i kroppens sundhed. Et team af universitetsingeniører
 Hvis du er over 50,
Det er tid til en koloskopi Folk udskyder at gøre bestemte ting - rydder op i garagen, maling af stuen, vaske vinduer ... og få en koloskopi. Men en koloskopi er sandsynligvis den bedste enkeltmuligh
Hvis du er over 50,
Det er tid til en koloskopi Folk udskyder at gøre bestemte ting - rydder op i garagen, maling af stuen, vaske vinduer ... og få en koloskopi. Men en koloskopi er sandsynligvis den bedste enkeltmuligh
 Usund tarmmikrobiom reducerer synaptisk beskæring af hjernen,
forringer læring En ny undersøgelse af Weill Cornell Medicine og Cornell University er kommet med flere forklaringer på, hvordan tarmmikrober kommunikerer med hjernens neuroner. Studiet, offentliggjor
Usund tarmmikrobiom reducerer synaptisk beskæring af hjernen,
forringer læring En ny undersøgelse af Weill Cornell Medicine og Cornell University er kommet med flere forklaringer på, hvordan tarmmikrober kommunikerer med hjernens neuroner. Studiet, offentliggjor